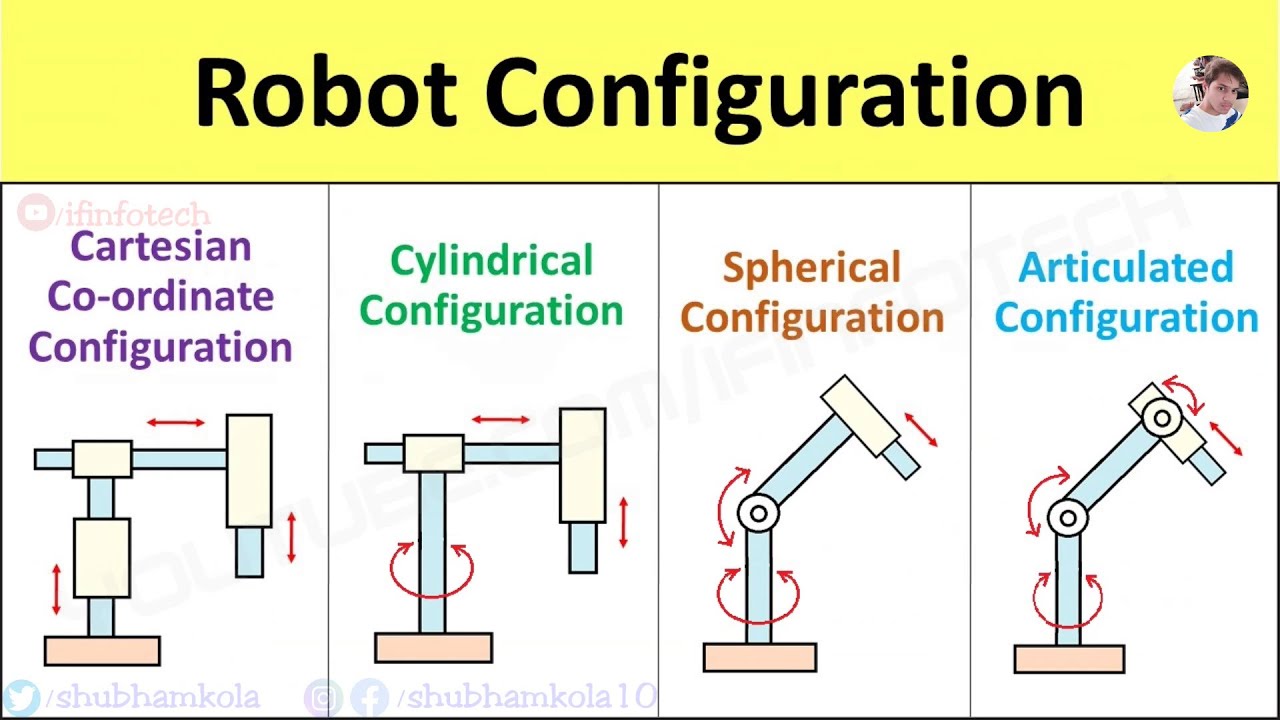
Types of Robot Configuration: Cartesian Coordinate, Cylindrical, Articulated, Spherical, SCARA Shubham Kola 5:29 4 years ago 195 037 Далее Скачать
Cartesian robot animation #cartesian #xyz #robot #gantry #animation Akshaya Simha 0:12 3 years ago 5 163 Далее Скачать
Cartesian robot with vertical T-Bot drive configuration Zaber Technologies 1:00 1 year ago 15 704 Далее Скачать
XYZ Gantry System - Pick and Place and Precision Handling Demo Zaber Technologies 0:33 1 year ago 22 461 Далее Скачать
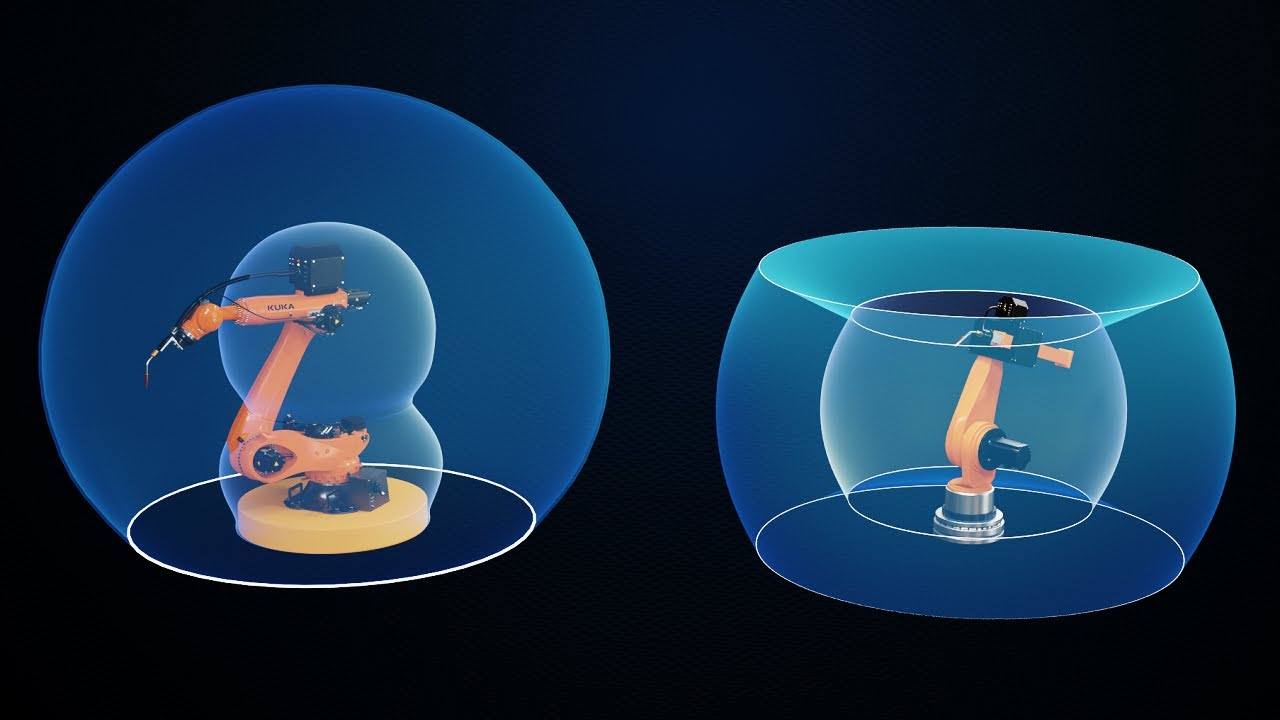
Understanding Work Envelopes of Robots! Sabins Civil Engineering 7:48 3 years ago 608 416 Далее Скачать
Factory Assembly - Multi axis Cartesian Robot Linear Positioning System FUYU Motion 0:16 2 years ago 11 869 Далее Скачать
Industrial Robot Configurations - Cartesian Configuration WIT Solapur - Professional Learning Community 12:03 5 years ago 1 976 Далее Скачать
10 - Industrial robots Common configurations Christian Tutivén Gálvez 7:35 2 years ago 80 Далее Скачать
Industrial Robotics & Automation | Episode 2 | Robot configurations | AeStudios 1:18 3 years ago 3 196 Далее Скачать
CARTESIAN ROBOT or robot arm of injection moldig machine forwater vat or bucket SANTSAi 0:16 2 years ago 1 724 Далее Скачать
Yamaha Intelligent Machinery - Robotics - Cartesian Robot - Moving Arm Type Yamaha Motor IM America 0:23 5 years ago 221 Далее Скачать